Month 1: Fundamentals of Electronics and Arduino Programming
Introduction to Arduino and Basic Electronics
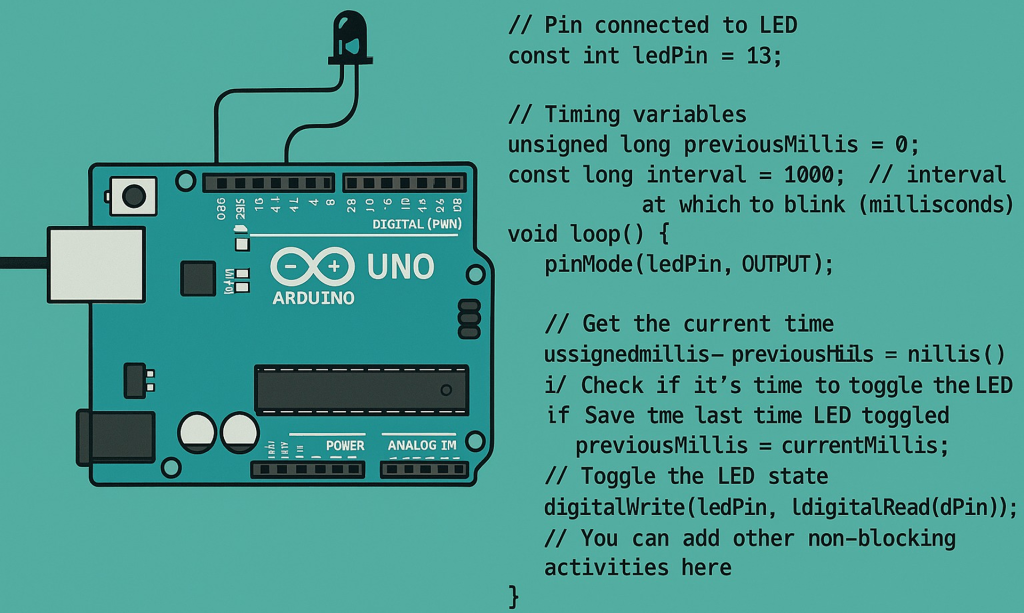
Learn the foundations of electronics including voltage, current, resistance, and Ohm’s Law. Get familiar with essential components like resistors and LEDs. Setup your Arduino IDE and run your first blink program to control LEDs.
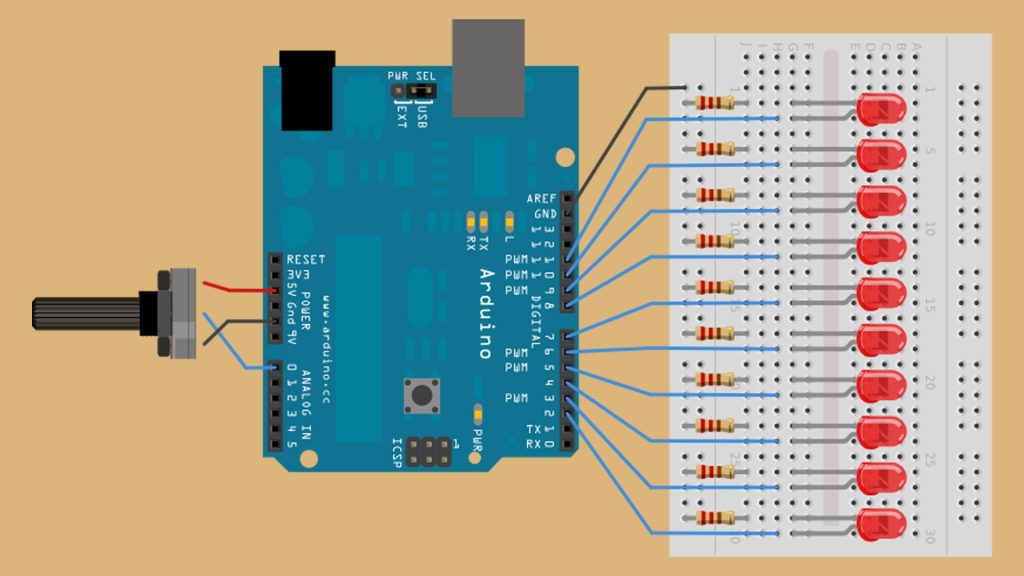
Use multiple digital pins to create eye-catching LED patterns such as the Knight Rider effect. Learn to write and use your own custom functions to keep your code clean and reusable.
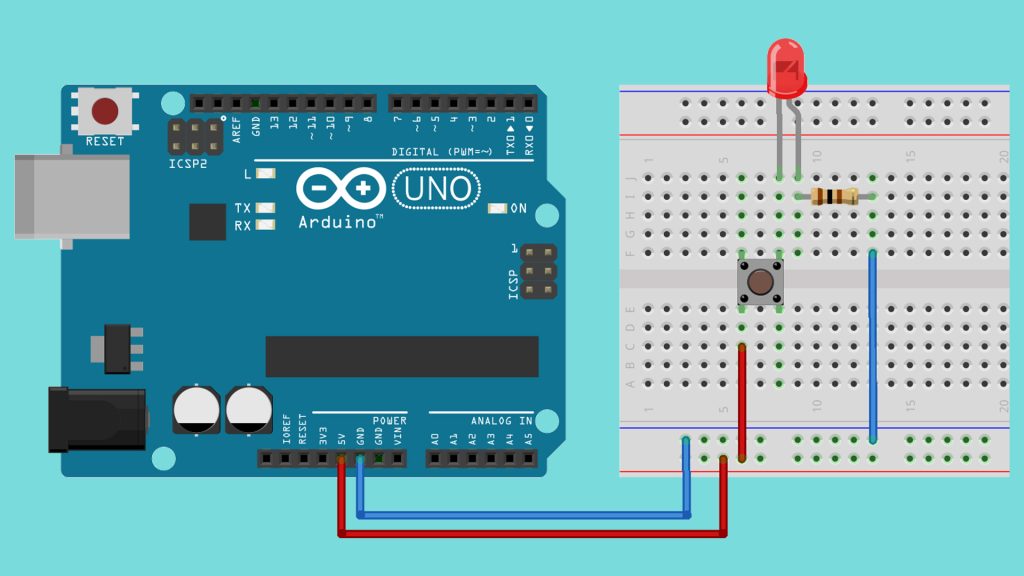
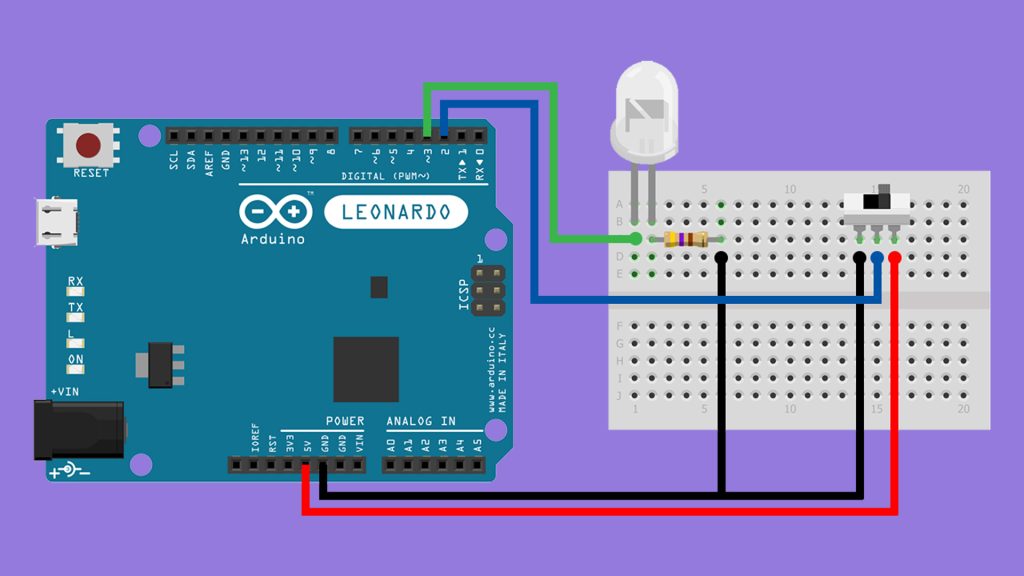
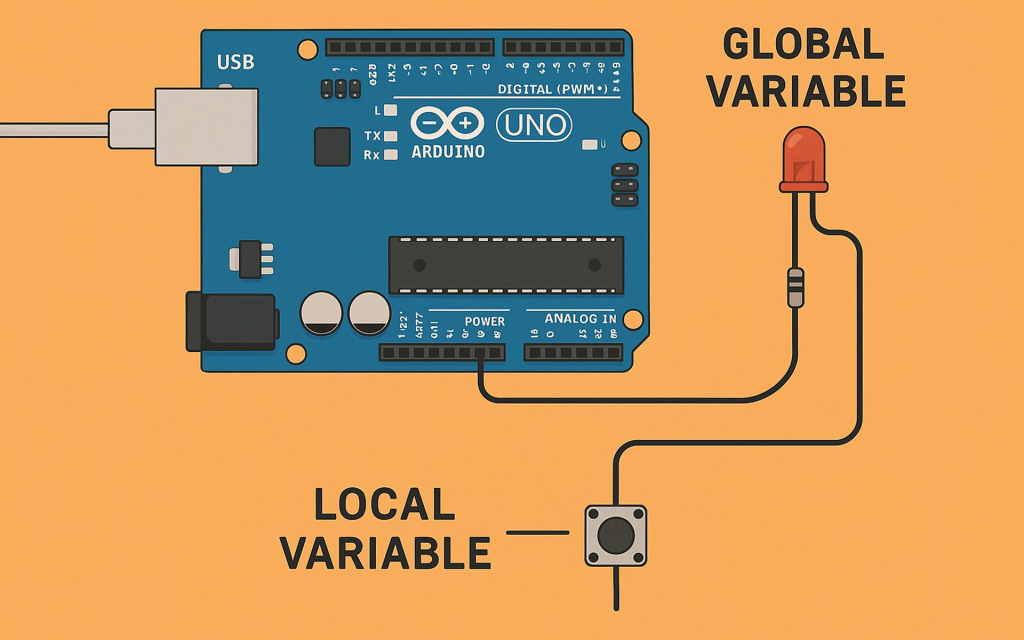
Explore digital inputs by connecting push buttons. Use digitalRead and internal pull-up resistors to detect button presses and practice simple logic with if/else statements. Learn basic debounce techniques for stable button input
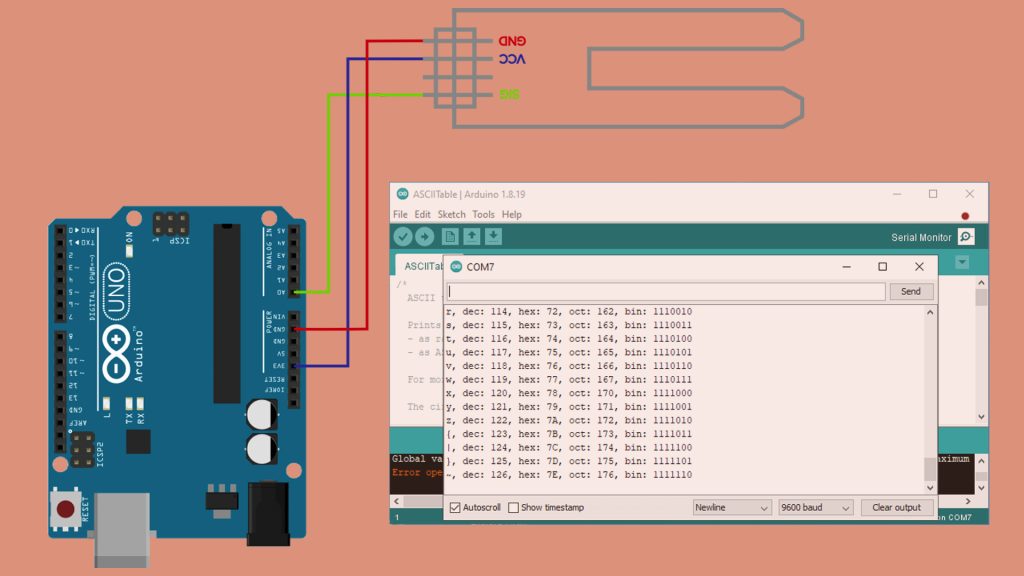
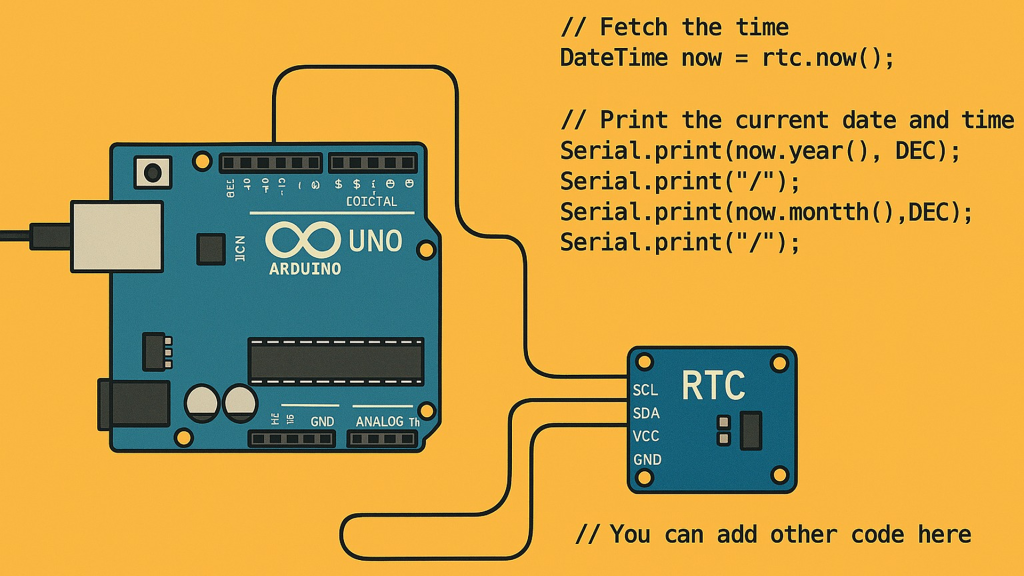
Master debugging skills by using Serial.print() to view sensor and button states. Combine input and output from previous weeks to build interactive projects with feedback.
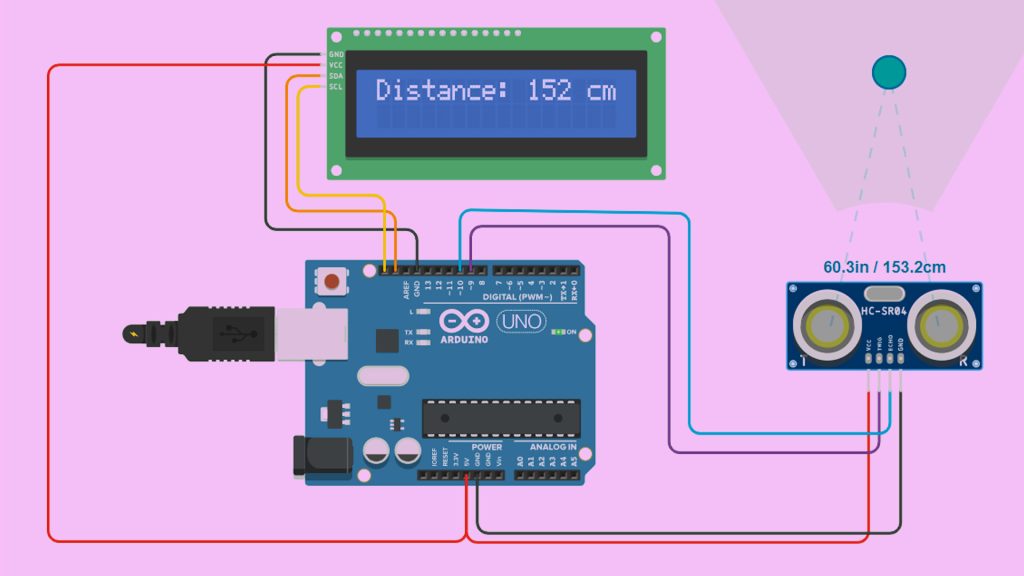
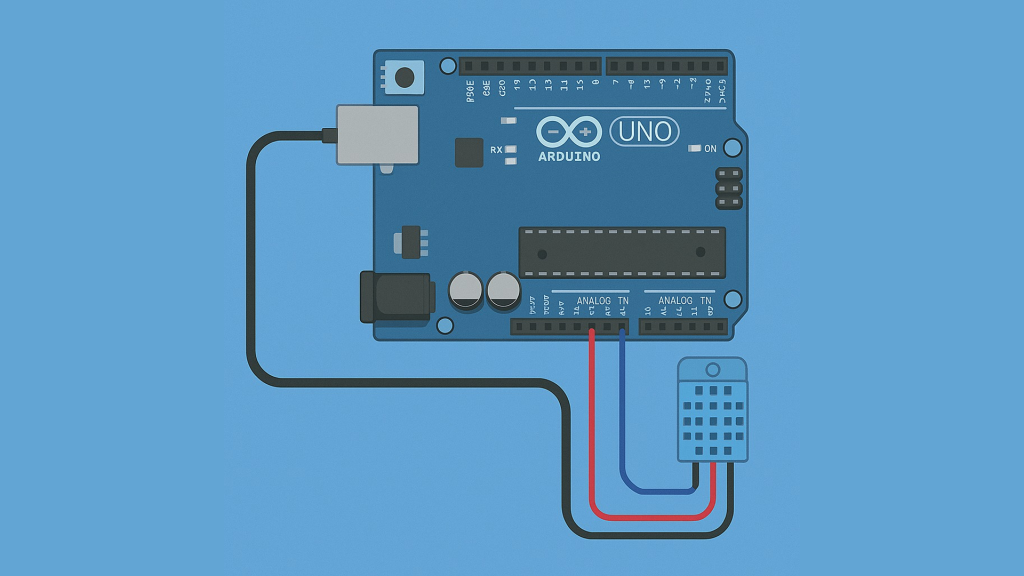
Understand the principle of ultrasonic waves and how the HC-SR04 sensor measures distance. Learn to solder sensor wires and test your distance measurement setup.
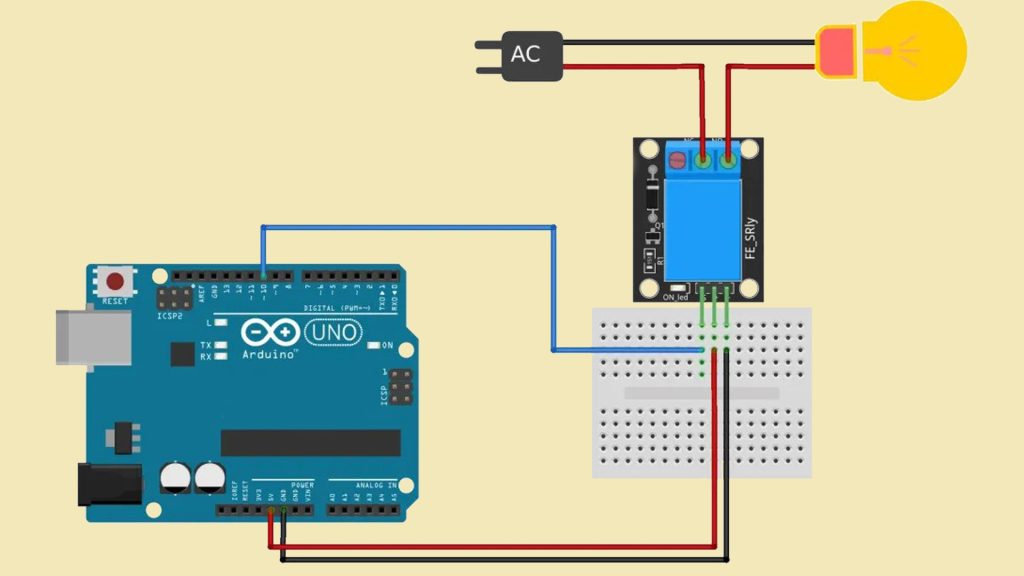
Learn how relays work and how to switch high voltage AC loads safely using a 5V relay module. Understand the essential safety precautions when dealing with AC circuits.